

电机至少占美国能源消耗的一半。为应用选择正确的控制方法可使电机最有效地运行,同时最大化扭矩和整体性能。高效运行的电机也可以减少能源消耗,减少停机时间,从而节省更多成本。
对于由变频器(VFD)控制的电机,大部分使用的控制方法决定了电机在应用中的效率和性能。一旦工程师和设计人员了解每种控制方法的优点,缺点和特定规格,为任何应用选择合适的控制方法都变得简单。
控制方法
业内许多人认为控制方法是控制VFD的排序方法,如2线和3线设置。这种2线和3线设置确定VFD的输入控制端子是否与保持的触点或瞬时按钮接口以启动和停止驱动器。本文所关注的控制方法可能更准确地称为运动控制方法。他们确定VFD如何控制电机。
连接到VFD的感应电动机有四种主要类型的电动机控制方法:V / f(伏特/赫兹),带编码器的V / f,开环矢量和闭环矢量。这些方法都使用脉冲宽度调制(PWM),这种技术通过调制脉冲持续时间来改变固定信号的宽度,以产生可变模拟信号。
通过使用VFD直流母线电容器的固定直流电压,将PWM应用于VFD。输出侧的一组绝缘栅双极晶体管(IGBT)快速打开和关闭以产生脉冲。改变输出电压波形中的输出脉冲宽度可以构建模拟的AC正弦波。即使驱动器的输出电压波形由DC脉冲引起的方波组成,电流波形也是正弦波,因为电机是电感式的。所有电机控制方法都依靠PWM电压波形来控制电机。控制方法之间的区别在于它们如何在任何给定时刻计算电机的电压需求。

通常使用脉冲宽度调制来控制AC电动机。在此过程中,载波频率(以红色显示)是VFD输出晶体管门控或调谐的速率。载波频率通常可以是2至15kHz。频率参考(蓝色)是发送到电机的速度信号,通常为0到60 Hz。当覆盖两个波形时,工程师可以使用这两条曲线之间的交点来调制输出直流脉冲(黑色),以提供所需的速度控制。
V / f控制
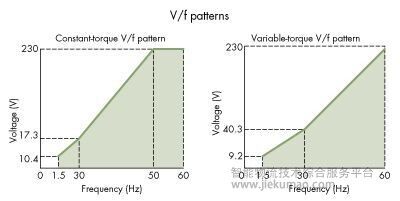
不同的V / f模式使VFD可以控制多个不同的应用,同时保持每个应用的最佳性能。恒定扭矩模式是直线,这导致恒定的V / f比,在整个速度范围内提供恒定的电动机扭矩。可变转矩模式在较低速度下具有较低的电压以防止电动机饱和。
伏特/赫兹,通常称为V / f,是最简单的电机控制方法。它经常被使用,因为它具有“即插即用”的简单性以及驱动器所需的电机数据量。它不需要编码器,也不需要将VFD调谐到电机(但推荐)。这意味着更低的成本和更少的布线。V / f控制通常在需要运行时使用,可能超过1,000 Hz,因此通常用于机床和主轴应用。
V / f是唯一允许多个电机从单个VFD运行的控制方法。在这种情况下,所有电机同时启动和停止,并遵循相同的速度参考。
V / f有一些限制。例如,使用V / f时,无法保证电机轴正在旋转。此外,电机的启动转矩限制在3 Hz输出的150%。对于大多数可变扭矩应用而言,有限的启动扭矩绰绰有余。事实上,现场几乎所有可变扭矩风扇和泵应用都使用V / f控制。
V / f方法的相对简单性部分归因于其“更宽松”的规范。速度调节通常为最大频率的2%至3%。速度响应额定值为3 Hz。速度响应定义为VFD响应参考频率变化的程度。当参考频率改变时,速度响应的增加导致更快的电动机响应。
控制方法还具有速度控制范围(表示为比率)。V / f的速度控制范围是1:40。将此比率乘以最大频率可确定VFD控制电机的最小运行速度。例如,使用60 Hz最大频率和1:40速度控制范围,使用V / f控制的驱动器可以将电机控制在1.5 Hz。
AV / f模式定义了电机的电压与频率之比,VFD一次只能编程一个V / f模式。V / f模式或曲线根据给定的速度参考(频率)确定输出到电机的电压。
操作员或技术人员可以使用单个参数在VFD编程中选择预设的V / f模式。预设模式针对特定应用进行了优化。用户可以更进一步,编程自定义V / f模式或配置文件,以将VFD调谐到特定应用和正在使用的电机。
风扇和泵等应用是可变扭矩负载。可变扭矩V / f模式可防止故障并提高性能和效率。该模式通过降低较低频率的电动机电压来降低低频时的磁化电流。
同样,恒转矩应用,如输送机,挤出机和提升机,应使用恒转矩V / f模式。恒转矩应用在所有速度下都需要全磁化电流。因此,在整个速度范围内构建并遵循直线斜坡。
通常,VFD将根据电机设置的任何速度输出电压,同时参考V / f模式。
带编码器的V / f
如果应用需要更精确的速度调节,并且能够以更高的参考频率运行,则可以将编码器添加到V / f控制。编码器反馈将速度调节降至最大频率的0.03%。输出电压仍由技术人员在VFD中编程的所选V / f模式决定。这允许高速控制而没有高动态响应,因为电压和频率是预定的。
这种控制方法并不常见,因为它需要编码器和反馈卡的成本,并且其优于标准V / f控制的优点是最小的。启动转矩,速度响应和速度控制范围都与V / f控制相同。此外,较高的工作频率受编码器产生的每转脉冲数的限制。
开环矢量控制
开环矢量(OLV)控制用于更大和更动态的电机控制。它独立控制电机速度和扭矩,就像控制直流电机一样。
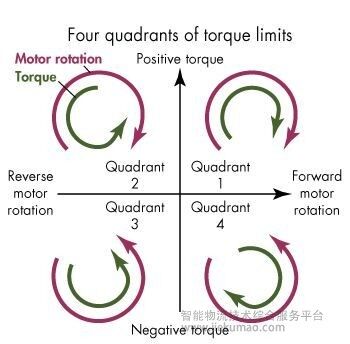
根据电机方向(正向或反向)以及电机是电动还是再生,转矩极限可分为四个象限。例如,瓶盖将需要为象限1设置扭矩限制。或者,展开应用将需要正向电动机旋转来供给线,但是由于线被拉动以产生张力而由于再生而产生负扭矩极限。因此扭矩限制将在象限4中设定。
运行OLV时,电机可以0.3 Hz的频率产生200%的额定扭矩。较低速度下较高的启动扭矩为各种应用打开了大门。该控制方法还允许四象限扭矩限制。
扭矩限制主要限制电机扭矩,以防止损坏设备,机器或产品。它们分为四个不同的象限,取决于电机方向(正向或反向),以及电机是电动还是再生。可以为每个象限单独设置限制,或者用户可以将整体扭矩限制编程到VFD中。
电动机状态是指电动机的速度和转矩都在同一方向。例如,前进速度和前进扭矩将使输送机向前运动。再生是指负载对电机进行大修。在AC电动机上,当转子比定子中的磁场旋转得更快时,它起到发电机的作用。这导致再生能量流回VFD。

例如,瓶盖可以使用象限1中的扭矩限制(正向旋转和正向扭矩)以防止瓶盖过度扭矩。它向前移动并使用正扭矩将盖子放在瓶子上。涉及具有比空车重的配重的电梯的应用在象限2中具有限制(反向电动机旋转和正扭矩)。如果将空车调到较高楼层,则扭矩与速度方向相反,以保持对配重的控制以及电梯在重力作用下的速度和位置。
从木块中取出螺钉的机器钻(反向电机方向和负扭矩)可以使用象限3中的限制。退绕应用可以使用象限4限制(正向电机旋转和负扭矩)。电动机将旋转电动机旋转以供给线路,但是由于线路被拉动以产生张力而导致再生,因此还需要负的扭矩限制。
矢量控制通过将转矩产生电流(Iq)和磁化电流(Id)保持在90°来最大化每转矩。I1表示总电动机电流(Iq + Id)。如果¨> 90°,那么sin¨> 1; 如果¨<90°,那么罪¨> 1; 但如果¨= 90°,则sin¨= 1且扭矩达到最大值。VFD试图将¨保持在90°以模拟直流电机。在直流电机中,电刷与换向器机械定位成90°,以不断产生最大扭矩。
这些VFD中的电流反馈回路允许用户设置扭矩限制并在所有四个象限中运行。随着电动机电流的增加,电动机转矩也随之增 如果应用需要更大的扭矩,则可以增加输入到电机的输出电压;当达到扭矩限制时,可以减小输出电压。与V / f控制不同,这使得开环控制动态化。
除扭矩限制外,开环控制还具有10 Hz的更快速度响应,使其能够处理对冲击负载的更多动态响应。例如,岩石破碎机的负荷会不断变化,这取决于正在处理的岩石的大小和数量。
OLV控制使用矢量算法来找到运行电机的最佳输出电压,而不是固定的V / f模式。矢量控制通过使用来自电机的电流反馈来实现此目的。通过VFD内部的电流互感器测量电流反馈。在VFD中执行的恒定电流读数和快速计算确定当前的扭矩需求和通量。基本矢量数学将电机的磁化电流和产生转矩的电流分解为矢量。OLV控制在很大程度上取决于电机动态,因此必须执行某种类型的电机自整定,以确保VFD具有尽可能多的电机数据。
借助可靠的电机数据/参数,VFD可以将磁化电流(I d)和转矩产生电流(I q)计算为矢量。为了获得最大效率和扭矩,VFD必须将这两个矢量分开90°。90°是重要的,因为sin(90)= 1,值1表示最大电动机扭矩。
整体OLV控制导致更严格的控制。速度调节是最大频率的+/- 0.2%,速度控制范围跳至1:200,允许低速运行而不会牺牲扭矩。
闭环矢量控制
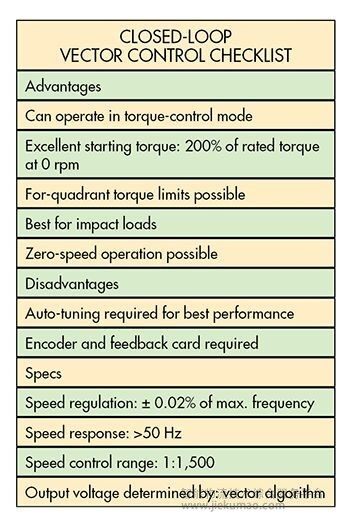
闭环矢量控制使用矢量算法来确定输出电压,非常类似于开环控制。关键的区别在于闭环矢量使用编码器。编码器反馈与矢量控制配合使用,意味着在0 rpm时可获得200%的电机额定转矩。这是需要在不移动的情况下保持负载的应用程序的卖点,例如电梯,起重机和升降机。
编码器反馈允许速度响应超过50 Hz,速度控制范围为1:1500,是所有控制方法中最高的。闭环控制还可以在转矩控制模式下运行电机。转矩控制使VFD控制电机转矩而不是电机转速。在扭矩比速度更重要的任何应用中都需要这样做。卷绕机,复卷机,封盖机和卷筒纸应用程序是使用扭矩控制的好例子。
 捷库猫APP
捷库猫APP 微信公众号
微信公众号






